您的位置:
您的位置:
- 详细信息
产品说明
三种控制方式,无缝切换:位置控制、速度控制、转矩控制
6路SI输入,6路SO输出
输入形态:脉冲+方向、AB相脉冲、CW/CCW信号
输入频率:集电极开路200kpps,差分500kpps
接口电路:集电极(+24V电平),差分(+5V电平)
通讯口:RS232、RS485标配
命名规则
|
1: |
系列名称 |
DS5K:精简型伺服驱动器 |
|
2: |
输入电压 |
2:AC220V |
|
3: |
功率 |
0P4:0.4KW |
|
0P7:0.75KW |
||
|
4: |
编码器类型 |
PTA:通讯编码器 |
规格参数
|
项目 |
DM5F系列二合一伺服 |
||
|
基本规格 |
功率范围 |
0.4~0.75KW |
|
|
输入电源 |
单相AC200~240V; 三相AC200~240V,使用50/60Hz; |
||
|
编码器反馈 |
17Bit/23Bit通讯编码器 |
||
|
控制方式 |
三相全波整流IPM PWM控制、正弦波电流驱动方式 |
||
|
使用 环境 |
环境温度 |
运行:-10~+40℃(无凝露)/保存:−20~+60℃(无凝露) |
|
|
环境湿度 |
运行/保存:90%RH以下(无凝露) |
||
|
耐振动/耐冲击 |
4.9m/s2/ 19.6m/s2 |
||
|
功能 |
保护功能 |
过压、欠压、过热、过流、过载、超速、模拟输入异常、位置偏差过大、输出短路、编码器异常、再生异常保护、超程保护、振荡保护、运行断线保护等 |
|
|
动态制动器 |
无 |
||
|
通讯功能 |
RS232/RS485:标准MODBUS RTU协议 |
||
|
制动电阻 |
内置制动电阻、可外接制动电阻 |
||
|
显示及操作 |
5位LED指示灯、电源指示灯、2个运行指示灯、4个按键操作 |
||
|
负载变动率 |
0~100%负载时:±0.01%以下(额定转速时) |
||
|
电压变动率 |
额定电压±10%:0.01%(额定转速时) |
||
|
温度变动率 |
20±25℃:±0.1%以下(额定转速时) |
||
|
输入输出信号 |
位置 输出 |
输出形态 |
ABZ相5V差分 |
|
分频功能 |
支持 |
||
|
集电极Z相输出 |
支持 |
||
|
模拟量输入 |
无 |
||
|
数字输入 |
6路SI输入 |
||
|
伺服使能、报警清除、禁止正转、禁止反转、转矩限制选择、内部速度选择、齿轮比切换、模式切换、脉冲输入禁止、零速锁定、位置偏差清除、内部位置换步信号、内部控制模式方向切换 |
|||
|
数字输出 |
6路SO输入 |
||
|
定位完成、伺服准备就绪、报警输出、转矩限制输出、同速检测、旋转检测、速度到达、制动器释放输出、警告输出 |
|||
|
位置控制模式 |
最大输入脉冲频率 |
集电极开路:200kpps 差分:500kpps |
|
|
脉冲指令模式 |
可接受3.3~5V、18~24V脉冲+方向、AB相脉冲、CW/CCW信号 |
||
|
控制方式 |
外部脉冲/内置位置 |
||
|
前馈补偿 |
0~100%(设定分辨率为1%) |
||
|
定位完成宽度设定 |
0~65535指令单位(设定分辨率为1指令单位) |
||
|
电子齿轮比 |
1/10000≤B/A≤10000 |
||
|
速度控制模式 |
控制方式 |
内部三段速、外部速度模式 |
|
|
指令平滑方式 |
低通滤波器,平滑滤波器 |
||
|
模拟量输入 |
电压范围 |
无 |
|
|
输入阻抗 |
无 |
||
|
转矩限制 |
内部参数 |
||
|
速度变动率 |
外部负载额定变动0~100%负载时:±0.01%以下(额定转速时) |
||
|
额定电压±10%:0.01%(额定转速时) |
|||
|
环境温度20±25℃:±0.1%以下(额定转速时) |
|||
|
转矩控制模式 |
控制方式 |
内部转矩 |
|
|
指令平滑方式 |
低通滤波器,平滑滤波器 |
||
|
模拟量输入 |
电压范围 |
无 |
|
|
输入阻抗 |
无 |
||
|
速度限制 |
支持 |
||
|
总线控制模式 |
控制轴数 |
无 |
|
|
通讯协议 |
无 |
||
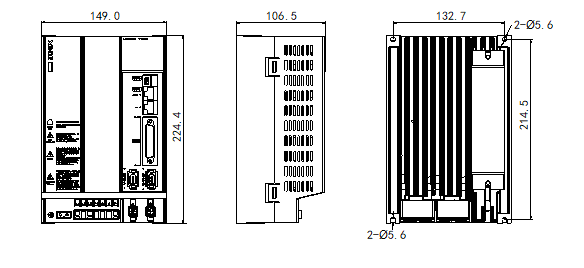
产品尺寸(单位:mm)
DM5F-20P4-2A、DM5F-20P7-2A 单位:mm